<nav id="adlyz"><big id="adlyz"></big></nav><abbr id="adlyz"><small id="adlyz"></small></abbr> | |
| |
|
<label id="adlyz"></label>
|
|
|
|
| | | <source id="adlyz"><output id="adlyz"><wbr id="adlyz"></wbr></output></source> |
�C(j��)�^(q��)
��(bi��o)�}: �C(j��)���o(w��)�˻��\(y��n)�D(zhu��n)�Č�(sh��)�F(xi��n)���������ô�����ģ� [��ӡ���(y��)]
����: jiajoin �r(sh��)�g: 2018-7-26 09:53
��(bi��o)�}: �C(j��)���o(w��)�˻��\(y��n)�D(zhu��n)�Č�(sh��)�F(xi��n)���������ô�������������
�ڙC(j��)е����ӹ��ИI(y��)��ʹ���Ԅ�(d��ng)���O(sh��)���o�����y(t��ng)�ӹ���(sh��)�F(xi��n)�o(w��)���Ԅ�(d��ng)�����a(ch��n)���Ǵ��(sh��)��څ��������l(f��)��(d��ng)�C(j��)���w������܇�l(f��)��(d��ng)�C(j��)�ĺ��IJ���֮һ������������Լӹ����a(ch��n)���ЙC(j��)�����Ԅ�(d��ng)�������b�õ��O(sh��)Ӌ(j��)��(du��)����������ӹ����Ⱥ�Ч������Ҫ���x����������挢����Įa(ch��n)�����ֳ��l(f��)����������쵽�C(j��)�����x���������צ���O(sh��)Ӌ(j��)��������b�Aλ�õȸ�����Č�(sh��)����
һ����������w�����O(sh��)Ӌ(j��)
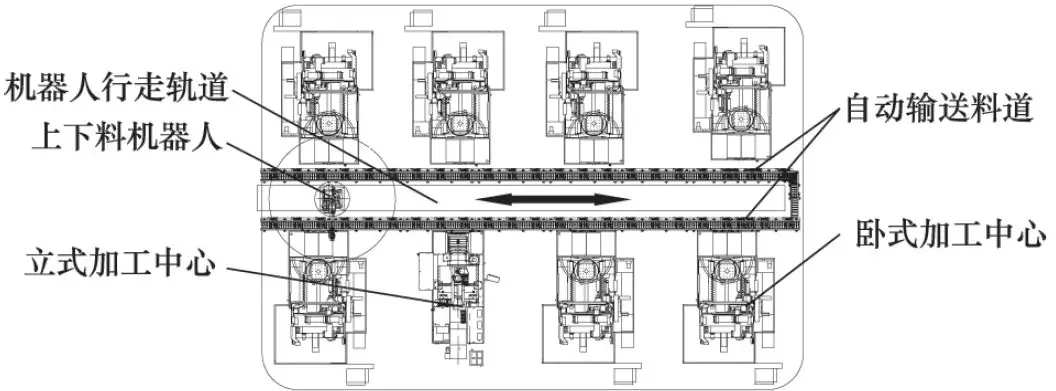
�a(ch��n)������ʹ��8�_(t��i)�C(j��)����(li��n)�������������(sh��)�F(xi��n)���w����Ĵּӹ��c�뾫�ӹ��������Ҫ��C(j��)���ˌ�(sh��)�F(xi��n)8�_(t��i)�C(j��)�����Ԅ�(d��ng)�������������
�D1 ���w���a(ch��n)������
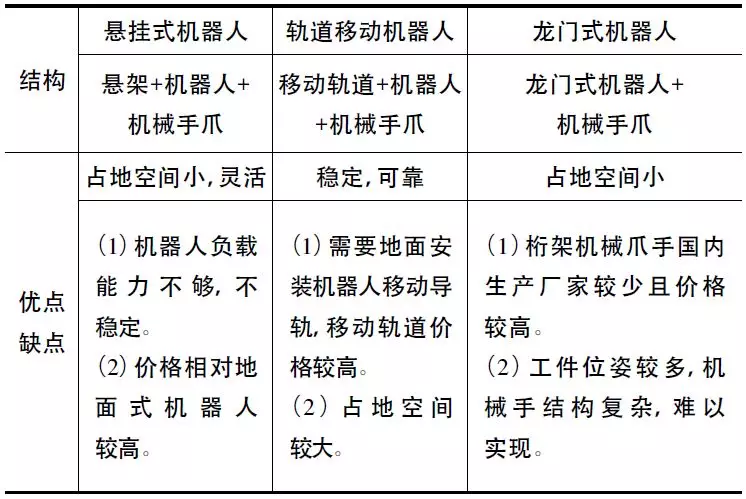
�C(j��)�����������b��ͨ����3�N��ʽ��������Ғ�ʽ�C(j��)����( �Ҽ�+����ʽ�P(gu��n)��(ji��)�C(j��)����+�C(j��)е��צ) �������܉���Ƅ�(d��ng)ʽ�C(j��)����( �Ƅ�(d��ng)܉��+�P(gu��n)��(ji��)�C(j��)����+�C(j��)е��צ) �����Tʽ�C(j��)����( ��ܙC(j��)����+�C(j��)е��צ) ��������@3�N��ʽ�ă�(y��u)ȱ�c(di��n)��(du��)�����±��������
�C(j��)���˷�����(du��)�ձ�
��a(ch��n)��Ҫ��C(j��)����ؓ(f��)�d�����^��( ץȡ������150kg; ��������������w����80kg��������A��70kg) ����������w�ӹ��^����λ���^������������˴_��ץȡ�еķ�(w��n)���ɿ��������ͨ�^��(du��)��3�N�����������x��܉���Ƅ�(d��ng)�C(j��)����( �Ƅ�(d��ng)܉��+�P(gu��n)��(ji��)�C(j��)����+�C(j��)е��צ) �����������(j��)����w�Y(ji��)��(g��u)����������w�������O(sh��)Ӌ(j��)��D2��ʾ�������
�D2 �Ԅ�(d��ng)������ϵ�y(t��ng)�Y(ji��)��(g��u)
����������C(j��)�����x�ͼ�܉���O(sh��)Ӌ(j��)
�����������^����Ҫ�^���λ�ú��ˑB(t��i)��׃�Q��������ʲ������S�P(gu��n)��(ji��)�C(j��)��������������ˌ�(sh��)�F(xi��n)�C(j��)������8�_(t��i)�C(j��)���Ԅ�(d��ng)��������������������S�P(gu��n)��(ji��)�C(j��)���˵Ļ��A(ch��)����չ�����S����ֱ�������S��������Գ��d��������(q��)��(d��ng)���������(d��o)���C(j��)�����ؽo���ķ���ֱ���\(y��n)��(d��ng)���������Ҫ�M(j��n)��ֱ��܉�����O(sh��)Ӌ(j��)��������ڙC(j��)�����Ԅ�(d��ng)�����ϕr(sh��)������������ֱ���Ҫ������x�^���C(j��)���˲����ֱ�ĩ��צ�ֺͰl(f��)��(d��ng)�C(j��)���w�����^�������������x���X݆�X�l+��(d��o)܉�ĽY(ji��)��(g��u)��ʽ�������
�D3 �C(j��)����ץ�ֽY(ji��)��(g��u)
����������C(j��)����צ���O(sh��)Ӌ(j��)
�C(j��)����צ���O(sh��)Ӌ(j��)Ҫ��A�ָ��w����һ���Ą����c��(qi��ng)����������܉�����ذѸ��w���M(j��n)�A��������������ڵ��ӹ�����������צ�ֽY(ji��)��(g��u)�O(sh��)Ӌ(j��)���������D3��ʾ�����������(j��)Ŀǰ�F(xi��n)�еİl(f��)��(d��ng)�C(j��)ģ�����������(du��)�C(j��)������צץȡ���w�Ķ�λ��ʽ�͊A���c(di��n)�M(j��n)���O(sh��)Ӌ(j��)��������x�����(c��)���һ����N�M(j��n)�ж�λ���������D4��ʾ�������
�D4 ��λ�A�oʾ��D
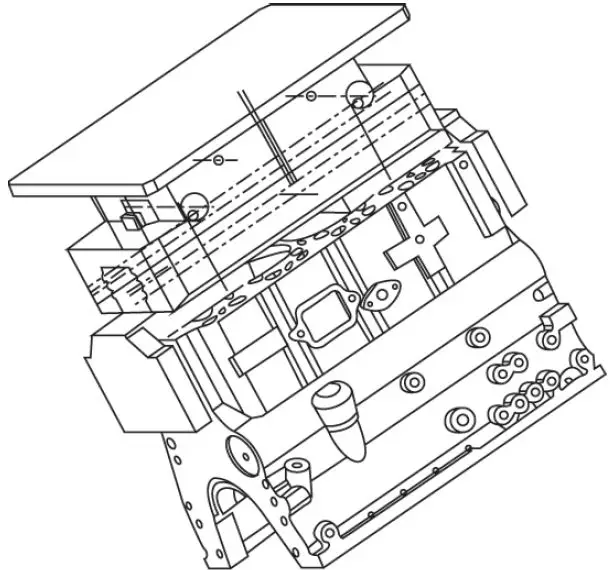
������������wλ�˵Ĵ_��
λ����ָ�_�����w��ݔ���ϵ��͙C(j��)���A���ϵ�λ�ú��ˑB(t��i)�����˷�����w���ϵ����\(y��n)ݔ�͊A�߶�λ�b�A��������Լ��C(j��)����ץȡ�r(sh��)���wλ��׃�Q�M���ܵ������������Ҫ�_�����w�������е�λ����������Ķ��p�ٙC(j��)���˄�(d��ng)����(ji��)���������
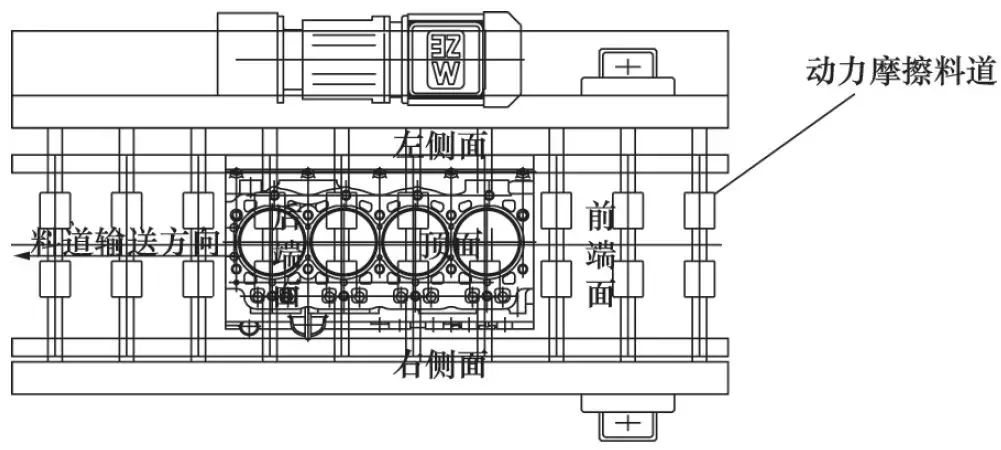
�D5 ���w�ڼӹ����a(ch��n)���е�λ��
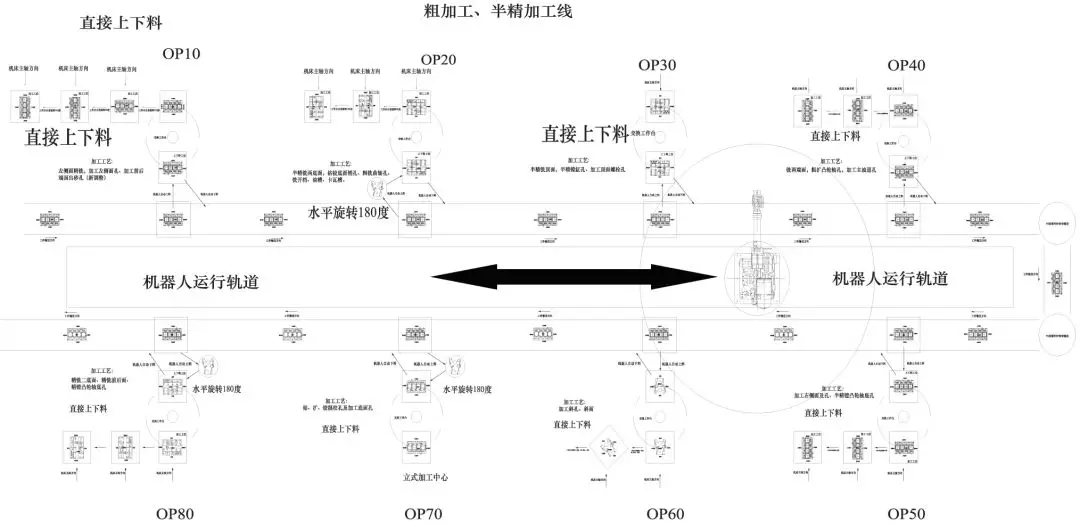
���w��ݔ���ϵ���λ��Ҫ����w��ݔ���ϵ���ݔ���^���бM���ܵ�ƽ��(w��n)��������c�ϵ���(d��o)܉�Ľ��|��M���ܴ�; �ڙC(j��)�������υ^(q��)�r(sh��)����������ڙC(j��)���˵�ץȡ��������p�ٙC(j��)������צץȡ���w�^���е��{(di��o)���r(sh��)�g; �M���ܲ���һ�יC(j��)������צ��������и��w�������Ϲ�������������w��ݔ���ϵ����υ^(q��)λ����D6��ʾ����������w�������������������c�ϵ���(d��o)܉����|�������ǰ������cݔ���ϵ�������ͬ������������xȡ���w��ǰ�������������C(j��)������צ��ץȡ�棬�xȡǰ������������ˮ���מ���צ��λ���������
�D6 ���w��ݔ���ϵ��ϵ�λ�Y
�Դ������������(j��)���Ͱl(f��)��(d��ng)�C(j��)���a(ch��n)�ӹ����c(di��n)�����������˙C(j��)�����Ԅ�(d��ng)������ϵ�y(t��ng)�Ĵ��������_����܉������ʽ�C(j��)�����Ԅ�(d��ng)ݔ�ͷ�ʽ�ļ��g(sh��)��������������ӹ���(zh��n)����o�����r(sh��)���@�s����������C(j��)���o(w��)�˻��\(y��n)�D(zhu��n)���Ԍ�(sh��)�F(xi��n)�������
. L! T \$ j: F" ]$ d3 D
����: Jry_A0Z8l �r(sh��)�g: 2018-7-26 09:56
�W(xu��)��(x��)�ˣ����������������x����
����: ���r(sh��)�����n�� �r(sh��)�g: 2018-7-26 10:26
�C(j��)е�ֱ������ϕr(sh��)�������߀Ҫ���]�ӹ����ĵ����a(ch��n)��(ji��)����������Ƿ��(hu��)�ڌ�(d��o)܉�Ϯa(ch��n)���r(sh��)�g�ϵĸ���
����: charlie909 �r(sh��)�g: 2018-7-26 10:59
�C(j��)���˵����S�����������150Kgؓ(f��)�d�ęC(j��)�������c(di��n)С���x��210Kg��(hu��)����һЩ��������ɱ����
| �gӭ���R �C(j��)е��^(q��) (http://e-learninguniversity.com/) |
Powered by Discuz! X3.4 |